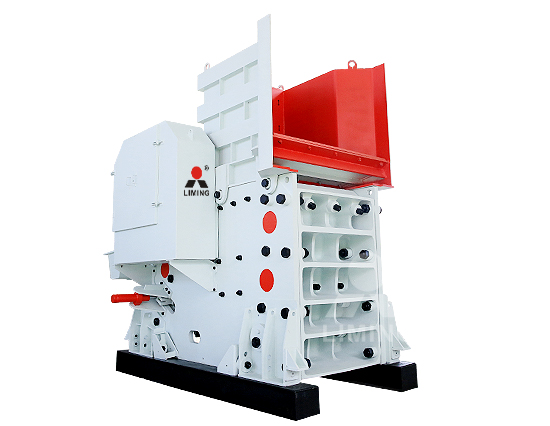
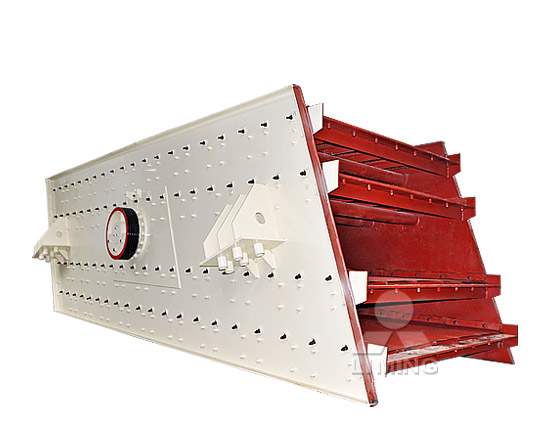
PCL750α鳞石英专用制砂机

PCL-750β-鳞石英高效制砂机
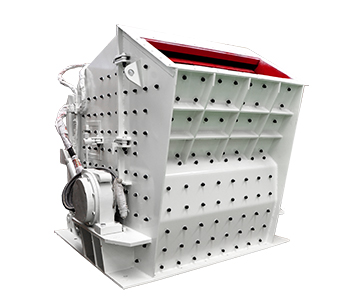
打沙机,碎石打沙机,打砂机设备,打沙机价格黎明重工制砂 新型5x制砂机作为专业的打砂机设备,它的应用范围覆盖了人工砂石料,预粉磨水泥、矿山、耐火材料、石英石、混凝土 温馨提示打电话咨询或者在线联系我们的工程师,可以获取产品详细的报价以及详细的定制化的制砂生产线配置。 ss-14-750α-鳞石英第三代制沙机上海黎明矿机始终坚持把客户的需 SS-14-750α-鳞石英第三代制沙机_pcl-750α-鳞石英冲击破pcl-750α-鳞石英冲击破磨粉机是工业原料和能源生产的重要装备,广泛应用于冶金、建材、化工、矿山等好域内矿产品物pcl-750α-鳞石英冲击破料的粉磨加 PCL-750α-鳞石英冲击破

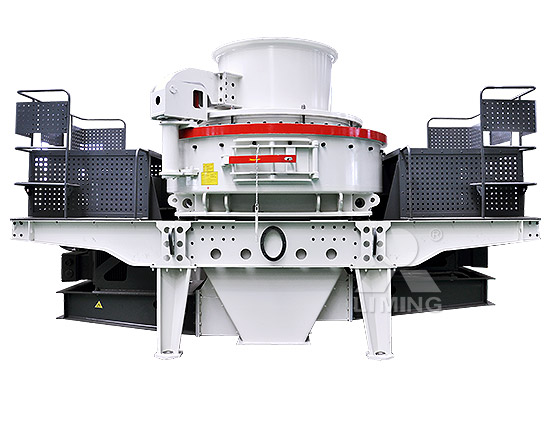
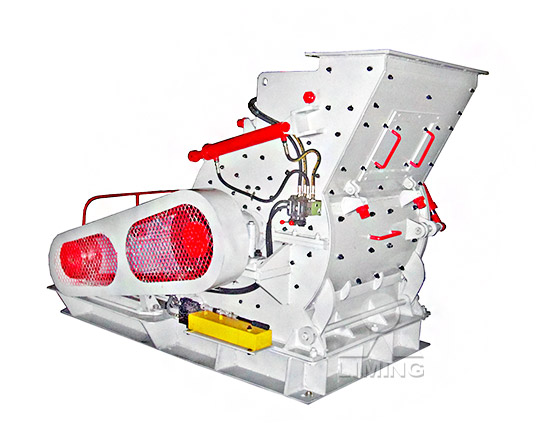
PCL-750锆英砂石头制砂机
郑州黎明矿山机器有限公司生产的pcl型制砂机是一种具有国际先进水平的高能低耗设备,其性能在各种矿石细破设备中起着不可替代的作用,是目前最行之有效、实用可靠的制砂 ss-18-2×750α-鳞石英pcl冲击式制砂机1522611基础建设离不开砂石,而随着世界各个**乃至个人对环保的逐渐重视,天然砂的采集成本越来越高,相应的机制砂成为人们的*选,所 SS-18-2×750α-鳞石英PCL冲击式制砂机本系列 制砂机 适用于软或中硬和极硬物料的破碎、整形,广泛应用于各种矿石、水泥、耐火材料、铝凡土熟料、金刚砂、玻璃原料、机制建筑砂、石料以及各种冶金矿渣,特别对 砂石设备 - 百度百科

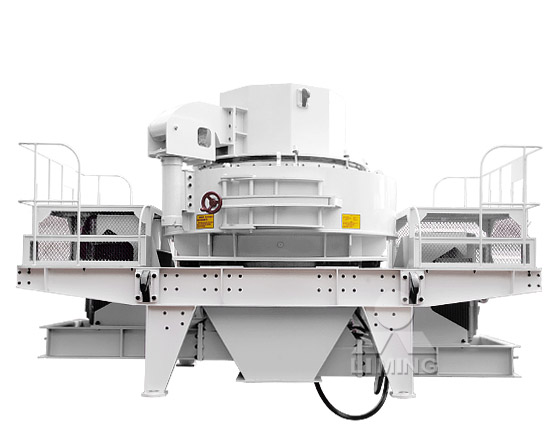
PCL-1350α-鳞石英粉砂机
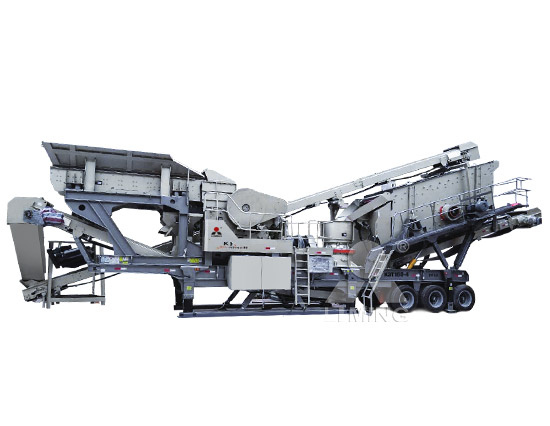
卵石制沙是目前主要的原料,经过卵石破碎处理和整形处理后,卵石机制砂成品很好的得到了应用,常常被用到重要的建筑项目当中。 Toggle navigation 首页pcl-750玄武岩专用制砂机立式冲击破碎机制砂机有石打石和石打铁二种型式,石打石型用于磨蚀性强的物料加工;石打铁型用。PCL-750玄武岩专用制砂机_2024年5月28日 文章浏览阅读2.3k次,点赞13次,收藏22次。PCD 全称 Point Cloud Data,是一种存储三维点云数据的文件格式,本教程将介绍如何使用 PCL 点云库将点云数据写入 PCD 文件。由于 PCD 是一种开放数 使用 PCL 库将点云数据保存为 PCD 格式文件 - CSDN博客

自定义速腾激光雷达点云XYZIRT格式并调用PCL库进行滤波
2023年2月9日 文章浏览阅读1.3k次,点赞2次,收藏5次。文章介绍了在Windows10+Ubuntu20.04环境下,使用VSCode和PCL库处理RS-LiDAR-32激光雷达的数据。通过定义自定义点云结构MyPointType,将ROS的XYZIRT格式转换为PCL可处理的格式,然后应用体素滤波和直通滤波进行点云下采样。文章浏览阅读1.3k次,点赞28次,收藏18次。在PCL中,有多种方法和函数可以用来提取点云特征,本文介绍关键点提取。提取点云关键点,本文介绍的方法包括:SIFT、Harris、NARF、ISS和SUSAN。Harris 提取点云关键点,效果如下图所示:白色点是原始的点云(兔子),绿色点是Harris提取的点云关键点。PCL从理解到应用【09】 点云特征 关键点提取 方法汇总2024年5月20日 文章浏览阅读998次,点赞22次,收藏6次。PCL 中有两种表示点云的数据结构,分别为 PointCloud 和 PCLPointCloud2。官方注释中常称为 a pcl::PointCloud object 以及 a PCLPointCloud2 binary data blob。两者的最大区别是储存数据的方式: PointCloud 为模板类,其中指定了每个。PCL中PCLPointCloud2和PointCloud类型的区别 - CSDN博客

PDO , PCL실 차이 쉽게 설명해드립니다 : 네이버 블로그
2004年12月16日 pcl실은 4주~3개월 사이에 효과가 나타납니다 빠른 효과를 원한다면 pcl실보단 pdo실이. 적합합니다. pcl실이 pdo실보단 좀 더 오래 유지되지만. 말랑말랑한 특성으로 코끝에 시술할 경우. 모양 잡기 어렵고, 잘 휘는 단점이 있습니다. pdo실은 천연분해되며 일반적으로class pcl::SACSegmentation SACSegmentation represents the Nodelet segmentation class for Sample Consensus methods and models, in the sense that it just creates a Nodelet wrapper for generic-purpose SAC-based segmentation. More SACSegmentation代表样本共识方法和模型的Nodelet细分类,因为它只是为基于通 点云库PCL各模块学习 - 12segmentation分割 - 《PCL (Point ...文章浏览阅读7.3k次,点赞12次,收藏74次。pcl点云可视化类一:pcl::visualization::PCLVisualizer基础显示功能:显示点云、网格、设置颜色、连线效果图高级功能:设置回掉函数进行交互、显示区域分割按键事件点选取事件效果图区域选取事件显示区域分割类二:pcl::visualization::CloudViewer可视化(Visualization ...点云学习笔记16——pcl点云可视化 - CSDN博客

大佬们这个怎么办呀【pcl吧】_百度贴吧
2024年3月2日 大佬们这个怎么办呀..下载 Forge 40.2.9失败→ 安装 Mod 加载器(方式 A)失败→ 安装新 Forge 版本失败→ 运行 Forge 安装器失败→ Forge 安装器出错,日志结束部分为:at sun.reLogin. Forget your passwrod?Log in - PCL Holding Co.,Ltd.2023年12月24日 文章浏览阅读1.3k次,点赞11次,收藏15次。然后新建一个build文件夹,在build文件夹中打开终端,输入 cmake , 然后输入 make,然后重新输入安装命令sudo apt install libpcl-dev,问题解决并安装成功。最近在学习点云库(PCL)的使用,第一步就是在自己的电脑安装配置PCL。Ubuntu20.04纯命令配置PCL(点云库) - CSDN博客

PTSD Checklist for DSM-5 (PCL-5) - PTSD: National Center for PTSD
2023年12月6日 The PTSD Checklist for DSM-5 (PCL-5) is a 20-item self-report measure of the DSM-5 symptoms of PTSD. DSM-IV Checklist are also available. Apply for and manage the VA benefits and services you’ve earned as a Veteran, Servicemember, or family member—like health care, ...PCL株式会社はレーザ加工技術の会社です。環境にも配慮した新しい洗浄(クリーニング)技術であるレーザクリーナー機の企画製造から、テスト加工まで行っております。 他にもレーザ溶接機の販売・技術サポート PCL株式会社 - レーザクリーナー・レーザ加工技術 2024年2月27日 一般使用PCL来显示点云,PCL使用VTK来渲染点云,但是VTK会弹出一个独立的窗口来显示点云。在一般的Qt项目中,希望点云显示在QMainWindow或QWidget上,PCL自带的VTK无法实现此功能。VTK源码中提供了在Qt界面中嵌入VTK图像的功能,但PCL自带的VTK库没有提供相关的动态库。基于PCL的QT开发(两个月内更新完)_qt pcl-CSDN博客

【PCL 正式版】正式版累积更新 - 哔哩哔哩
先把正式版的更新发出来顺便修了个别 2.6.9 折腾出的新 Bug。关于联机,希望大家先,呃,放低期待这个版本有一个 ...眾達科技集團 - 提供國內外知名客戶光儲存、光通信及網通產品關鍵零元件 光收發模組之專業製造廠商。 本集團專注提升產品之原物料品質管控、生產效率高效化,並透過多年累積之光電、光機構制程能力,達成客戶滿意度要求。歡迎訪問眾達科技集團 PCL TECHNOLOGIES2023年4月17日 最近项目中使用到了pcl库的ICP算法,但是pcl库的ICP算法在点云数量较多时计算速度较慢。ICP算法中频繁的使用了kdtree最近邻搜索,而每次迭代中每个点的最近邻搜索是可以并行计算的,因此想到了使用omp来给ICP加速。PCL ICP使用OMP加速(ICP_OMP) - CSDN博客

PCL点云库(6) — Filters模块空间裁剪器类_pcl::cropbox-CSDN博客
2023年5月17日 公众号致力于点云处理,SLAM,三维视觉,高精地图等领域相关内容的干货分享,欢迎各位加入,有兴趣的可联系dianyunpcl@163。未经作者允许请勿转载,欢迎各位同学积极分享和交流。filters模块介绍PCL库中filters模块主要提供各种滤波器算法来对点云数据进行降噪、采样、平滑等操作,以提高点云 ...2024年1月17日 文章浏览阅读3k次,点赞24次,收藏42次。本文详细介绍了如何通过ros环境打开激光雷达,使用pcl从ros话题获取数据,并结合ros和pcl创建节点发布和可视化点云数据的过程。步骤包括配置ros环境、pcl包创建与编译,以及在rviz中可视化数据。11.2 PCL从ROS获取激光雷达的点云数据及处理 - CSDN博客2022年5月9日 文章浏览阅读2.3k次。基于均匀概率分布进行采样,达到降低数据量的目的;相比于VoxelGrid体素栅格采样,VoxelGrid能够在保证点云几何特征不变的条件下,控制点云空间间距,工程中使用的更多一些;_pcl uniformsamplingPCL入门系列 —— UniformSampling均匀降采样_pcl ... - CSDN博客