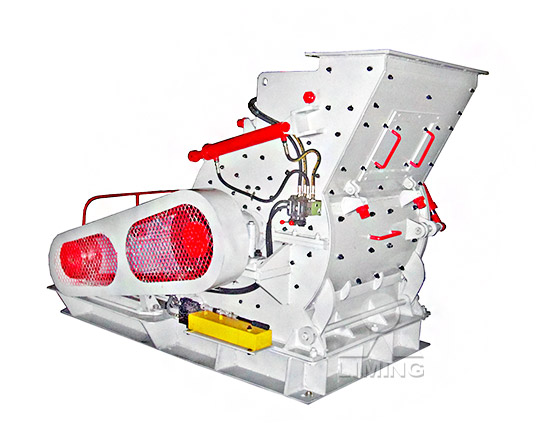
3R4R5R雷蒙磨易损件

3R系列雷蒙机磨辊易损件 雷蒙磨粉机配件磨辊 雷蒙磨 ...
型号:3R,订货号:245864524,加工定制:是,货号:L-12484,配件名称:雷蒙磨磨辊,配件用途:雷蒙磨维修,材质:高锰钢,品牌:浩禄,主要下游平台:ebay,亚马逊,wish,速卖通,独立 欢迎来到淘宝网选购直销 雷蒙磨易损件3r 4r 5r 磨环 雷蒙磨配件雷蒙磨粉机整机销售, 淘宝数亿热销好货,官方物流可寄送至全球十地,支持外币支付等多种付款方式、平台客服24 直销 雷蒙磨易损件3R 4R 5R 磨环 雷蒙磨配件雷蒙磨粉机 ...这是厂家供应雷蒙磨磨粉机各种3r4r5r配件高锰钢超细磨机超耐磨易损件的详细页面。 订货号:20230418,加工定制:是,货号:0418,品牌:其他,型号:齐全,别名:破碎机配件,用途: 厂家供应雷蒙磨磨粉机各种3R4R5R配件高锰钢超细磨机 ...

雷蒙磨机 - 百度百科
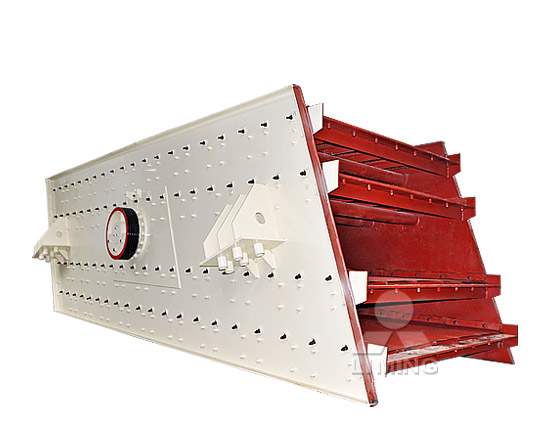
磨辊、磨环更换周期长,从而剔除了离心粉碎机易损件更换周期短的弊病。 该机的风选气流是在风机—磨壳—旋风分离器—风机内循环流动作业的,所以比高速离心粉碎机粉尘 3r雷蒙磨. 按照国际标准来划分,雷蒙磨粉机型号大致可以分为3r雷蒙磨、4r雷蒙磨、5r雷蒙磨、6r雷蒙磨等,其中,r指的是雷蒙磨的磨辊,前面的数字代表了磨辊的数量。 3r雷蒙磨 3R雷蒙磨-黎明重工科技股份有限公司 - lmlq雷蒙磨粉机配件易损件胶套3r4r5r6r磨机橡胶套磨辊磨环梅花架铲刀,好评率100%,10用户购后写下真实评论。 型号:3r4r5r,品牌:河南开泰,产地:中国大陆,颜色分类:红 雷蒙磨粉机配件易损件胶套3R4R5R6R磨机橡胶套磨辊磨环 ...

厂家供应雷蒙磨磨粉机各种3R4R5R配件高锰钢超细磨机 ...
欢迎来到淘宝网选购厂家供应雷蒙磨磨粉机各种3r4r5r配件高锰钢超细磨机超耐磨易损件, 淘宝数亿热销好货,官方物流可寄送至全球十地,支持外币支付等多种付款方式、平台客 2021年7月26日 损坏. 修复. 雷蒙磨配件的应力与粉磨的挤压载荷易使马氏体组织产生裂纹,当共晶碳化物沿晶界析出成网状,因其脆性会促进裂纹扩展,残留奥氏体的存在此时 雷蒙磨有哪些易损件? - 知乎2013年11月1日 摘要 分析了球面并联机构(SPM)工作范围受限的原因。本研究还开发了一种系统设计方法(Least Interference Design Methodology,LIDeM),用于减少连杆之间的干扰并增加机构的工作空间。针对3-RRR SPM,根据LIDeM理论给出了最优结构。通过对其数学模型的数值模拟,得到了修正连杆比β 1 和β 2 的最佳值。3-RRR球面并联机构干涉分析及工作空间优化,Mechanism and ...

Gebrauchte autoteile, zubehör online RRR
Finden Sie gebrauchte Autoteile, Zubehör online mit 14 Tage Geld-zurück-Garantie. Große Auswahl an hochwertigen Teilen für alle Fahrzeugmodelle!2019年2月3日 3-RRR球面并联机构优化设计研究杨健,周鑫,柳伟兵,赵宏宇(成都理工大学核技术与自动化工程学院,四川成都610059)来稿日期:018-0-0基金项目:机器人国家高技术863-809专题专家组;成都理工大学机械工程创新团队(1091-JXTD01501)作者简介:杨健,(197-),女,重庆人,博士研究生,副教授 ...3-RRR球面并联机构优化设计研究 - 道客巴巴介绍了称为“Agile-Eye”的 3-RRR(R - 旋转关节)球形并联机构的兼容版本。这种顺应性球面并联机构 (CSPM) 的运动静态分析是使用顺从矩阵法 (CMM) 进行的,评估两种不同类型的旋转顺从接头 (RCJ) 和三个输入。称为“Agile-Eye”的 3-RRR 球形并联机构的兼容版本 ...

3-RRR平面并联机器人工作空间边界求解和灵活性研究
内容提示: 文章编号:1004 -2539(2016)08 -0038 -05 DOI:10.16578/j. issn.1004.2539.2016.08.0093 - RRR 平面并联机器人工作空间边界求解和灵活性研究曹丽亚 崔建昆 宋亚楠(上海理工大学 机械工程学院,上海 200093)摘要 提出了求解平面并联机器人工作空间边界的基于迭代搜索法的圆周式搜索算法,并 ...分类号:th112单位代码:10110学号:s20100265中北大学3-rpr三自由度并联机构的性能研究硕士研究生武振华指导教师李瑞琴学科专业机械设计及理论2013年4月23日3-rpr三自由度并联机构的性能研究武振华中北大学陈英杰中北大学陈英杰中北大学3-rpr型平面并联机构基础研究论文题目姓名**大学华北图书分类 ...【优秀毕业论文】3-RPR三自由度并联机构的性能研究 ...Community media on 102.7FM, 3RRR Digital in Melbourne worldwide via RRR AppsTriple R 102.7FM, Melbourne Independent Radio

基于深度学习方法的平面3-RRR并联机器人动力学建模
摘要: 随着现代科技的快速发展,智能化正逐渐成为研究的热点,其中应用深度学习中的神经网络来解决传统的问题已经成为人工智能的重要研究领域.传统的平面3-rrr并联机器人动力学建模需要用到大量的公式,计算过程十分繁琐并且不便于应用.而采用深度学习中的rbf和bp神经网络来替代传统的方法 ...Impressum: Website-Inhaber und Autor: 3RRR GmbH Geschäftsführer: Dirk Reißenweber Sulzenstraße 4, 96237 Ebersdorf bei Coburg +49 9562 17 273-RRR针对具有强耦合和高非线性并联机器人的轨迹跟踪控制研究,设计了一种基于神经网络滑模控制器的控制系统。在传统滑模控制的基础上,利用神经网络算法实时修正系统非线性项和不确定参数的功能,有效抑制了SMC系统的抖振现象。建立了3-RRR平面并联机器人的结构简图和Matlab模型,并采用闭环 ...3-RRR平面并联机器人神经网络滑模控制研究 - 机床与液压

3-RRR球面并联机器人运动干涉检查及工作空间研究
为了将3-RRR球面并联机器人用于空间定位跟踪的执行机构,以欧拉角描述机器人末端动平台的姿态,建立机器人位置方程,得到了关节转角的表达式。用几何分析的方法给出了机器人具有姿态空间的必要条件以及各关节必须满足的结构约束。将球面机构的连杆表示为球面上的大圆弧,连杆发生的运动 ...针对球面3自由度并联机器人所有关节均为转动关节且关节轴线汇交于一点的结构特点,借助球面上大圆弧与四元数代数的对应关系,将构件的位置用四元数表示。采用四元数的乘积描述关节转动引起的构件位置的变化,通过球面上大圆弧几何加法与四元数乘法之间的对应关系,得到关节轴线的方向 ...3-RRR球面并联机器人正向运动学分析 - 机械传动2015年1月24日 天津大学硕I哮位论文 摘 要 本文密切结合国家“863”高技术发展项目,以开发“3-RRR”球面并联机 构的数控回转台样机为目标,以机器人机构学、计算机控制技术、软件工程学 为基础,研究了并联机构轨迹控制、多任务实时调度、数控系统建造方法,取 得了以下研究成果: 在轨迹控制方面,导出 ...3-RRR球面并联机构数控系统开发 - 豆丁网

3-RRR高速并联机器人运动学设计与实验 - sia.cn
提出一种基于机构奇异和运动传递性能指标的高速并联机器人运动学优化设计策略.优化设计过程分为两步:首先构造了无量纲参数设计空间,在设计空间中,研究了3-rrr机构的奇异和可用工作空间,分析了机构奇异曲线的分布特点,确定了无内部奇异的 3-rrr机构的参数取值范围;然后以全局条件数 ...摘要: 典型3-RRR平面并联机构是一种具有两平移一转动输出的平面定位、传送装置,其应用较广。 首先计算出该机构的耦合度k=1;其次,基于结构降耦原理,设计出一种零耦合度(k=0)的平面定位传送降耦机构,从而极易求得其位置正解解析式,且使得动平台的输入-输出具有运动解耦性;进一步,对 ...3-RRR平面并联机构的拓扑结构优化及其运动学性能改善摘要: 随着机器人学科的发展,科学家们提出了一种既具有串联机器人工作空间大也具有并联机器人的负载大、运动精度高 ...3-RRR-P型混联机器人动力学分析及其应用 - 百度学术

3-RRR球面并联机器人运动干涉检查及工作空间研究 ...
摘要 为了将 3-rrr 球面并联机器人用于空间定位跟踪的执行机构,以欧拉角描述机器人末端 动平台的姿态,建立机器人位置方程,得到了关节转角的表达式。摘要: 由于具有紧凑的空间布局和良好的结构刚度等特点,3自由度球面并联机构在肩,腕等多自由度关节的设计方面具有潜在的优势,但现有球面机构设计方法未结合人体肩关节工作空间呈非对称形貌,灵巧运动能力呈非对称分布的特点开展针对性的设计.本文以3-RRR非对称球面并联机构为原型,开展假肢 ...基于3-RRR非对称球面并联机构的假肢肩关节机构优化设计摘要: 采用Lagrange方法建立球面3-RRR并联机构基于动平台姿态参数的动力学模型.考虑在计算过程中采用线密度,厚度忽略等近似计算及工作过程中机构的磨损等微小变化造成的参数不确定性,进一步建立带参数不确定性的动力学模型.针对其在振动测试中的重复性动作等特点及参数不确定性设计鲁棒-自 ...球面3-RRR并联机构动力学建模与鲁棒-自适应迭代学习控制

可重构3 RRR并联机器人的“点对点”路径规划
第 3 期 黄宁宁,等:可重构3⁃rrr并联机器人的“点对点”路径规划 2 路径规划算法 本文是通过锁定转动副的方式实现机器人的