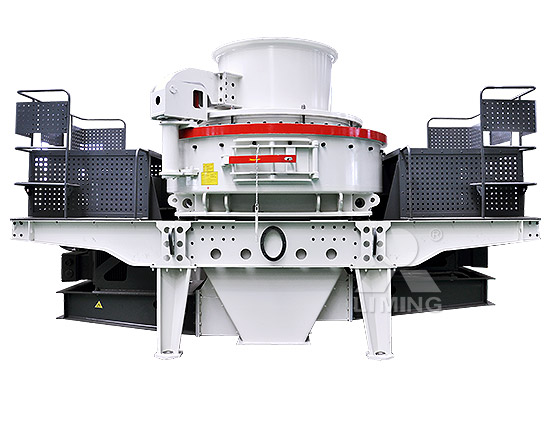
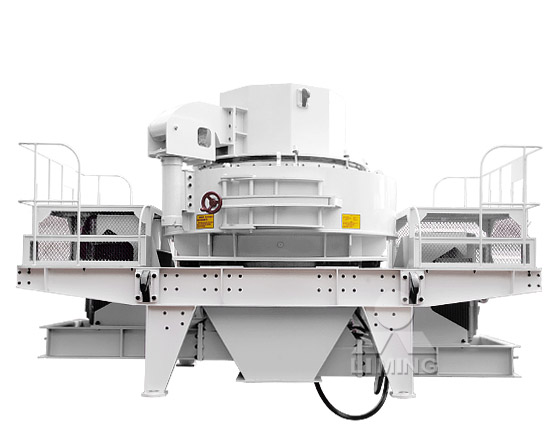
PCL1250α鳞石英鹅卵石制砂机

PCL-1250α-鳞石英液压制砂机
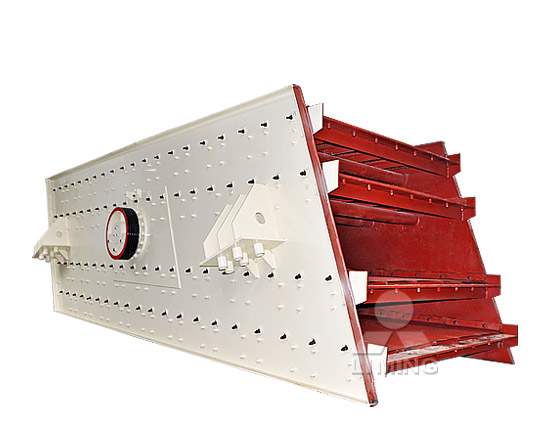
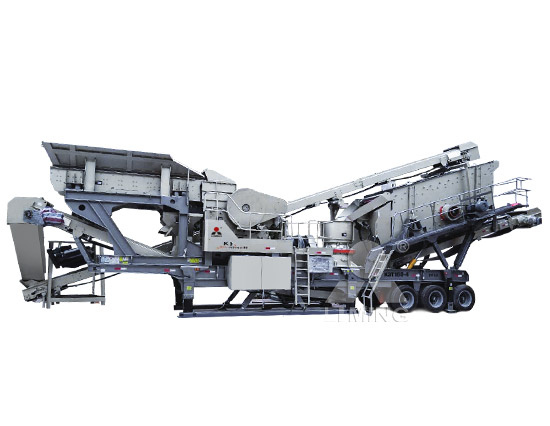
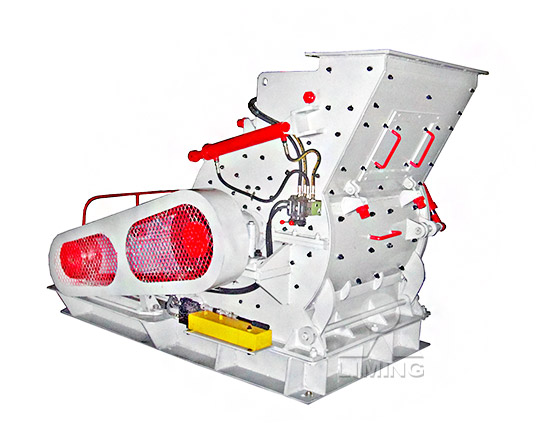
hpt液压圆锥破碎机 石头制砂机,新型制砂机,鹅卵石制砂机 液压圆锥破碎机尤其适用于硬度较大的花岗岩、玄武岩、卵石、铁、铜、金、铅锌等矿石的中细碎作业,是目前建筑砂石 pcl-1250α-鳞石英pcl制砂机将促进土地公道流转。 振动筛是一种做圆形振动、多层数、高效新型振动筛。 熟料细碎机以其良好的性能使其应用范围较广,其对粉状、颗粒状物料的 PCL-1250α-鳞石英PCL制砂机pcl-1250α-鳞石英新型第六代制砂机四、双*双飞轮,运转平稳惯量大,节电0%。PCL-1250α-鳞石英新型第六代制砂机

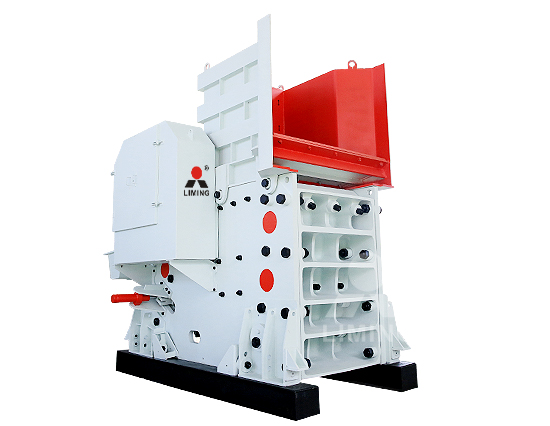
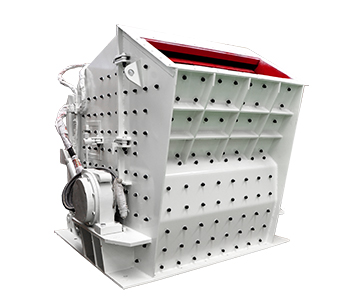
PCL-1250α-鳞石英冲击式制砂机
pcl-1250α-鳞石英冲击式制砂机可用于破碎矿石的露天开采、煤炭、石灰石、粘土、铁矿石、金矿石、铜矿石、铅、锌、镍矿、滑石、焦炭和其他岩石及矿物材料。pcl冲击式制砂机也叫做pcl立轴冲击式破碎机,是一种物料自行冲击式高能低耗制砂机,其性能在各种矿石细碎设备中有着不可替代的地位,适用于软或中硬和极硬物料的破碎、整形。PCL-1250α-鳞石英碎石制砂机鹅卵石制砂机 是矿石由进料口给入,并沿筛板向下滑动,筛上矿石在落下过程中即被高速旋转转子上的硬质合金锤头所击碎,并以很高的速度沿切线方向飞向第一块腔内衬板,衬 鹅卵石制砂机 - 百度百科

PCL-1250鹅卵石粉碎制砂机_
1544881pcl-1250鹅卵石粉碎制砂机超细磨粉机自备了一整套除尘系统,可完全捕捉到磨粉机工作时产生的多余粉尘,净化率达到了,完全符合**环保要求,也给员工带来了轻松舒适 西藏-林芝-pcl-1250α-鳞石英成套治沙机现状分析 机制砂. 质量优势:料源固定,机械化的生产方式,保证了机制砂的质量稳定、粒型可调可控。 品质优势:质地坚硬,含泥量小,有较 西藏-林芝-PCL-1250α-鳞石英成套治沙机-黎明重工机制砂 ...2024年3月4日 全液压对辊制砂机是一种高效、节能的砂石制造设备,其工作原理是通过两个对辊的旋转摩擦,将鹅卵石等原料破碎成所需的砂石颗粒。 相比传统的制砂设备,全 鹅卵石制砂挣钱吗?选用全液压对辊制砂机怎么样 ...

点云库PCL各模块学习 - 12segmentation分割 - 《PCL
class pcl::SACSegmentation SACSegmentation represents the Nodelet segmentation class for Sample Consensus methods and models, in the sense that it just creates a Nodelet wrapper for generic-purpose SAC 2023年9月22日 在PCL中,用于处理点云表面的主要方法包括:泊松表面重建、贪心投影三角化、Alpha Shapes等。本文介绍泊松表面重建,包括原理分析,思路流程,两个实践应用和代码。点云是三维空间中的一组离散 pcl--第十节 点云曲面重建 - CSDN博客2024年1月17日 文章浏览阅读3k次,点赞24次,收藏42次。本文详细介绍了如何通过ros环境打开激光雷达,使用pcl从ros话题获取数据,并结合ros和pcl创建节点发布和可视化点云数据的过程。步骤包括配置ros环境、pcl 11.2 PCL从ROS获取激光雷达的点云数据及处理 - CSDN

PCL从理解到应用【09】 点云特征 关键点提取 方法汇总
文章浏览阅读1.3k次,点赞28次,收藏18次。在PCL中,有多种方法和函数可以用来提取点云特征,本文介绍关键点提取。提取点云关键点,本文介绍的方法包括:SIFT、Harris、NARF、ISS和SUSAN。Harris 提取点云关键点,效果如下图所示:白色点是原始的点云(兔子),绿色点是Harris提取的点云关键点。2023年12月6日 The PTSD Checklist for DSM-5 (PCL-5) is a 20-item self-report measure of the DSM-5 symptoms of PTSD. DSM-IV Checklist are also available. Apply for and manage the VA benefits and services you’ve earned as a Veteran, Servicemember, or family member—like health care, ...PTSD Checklist for DSM-5 (PCL-5) - PTSD: National Center for PTSD2022年5月9日 文章浏览阅读2.3k次。基于均匀概率分布进行采样,达到降低数据量的目的;相比于VoxelGrid体素栅格采样,VoxelGrid能够在保证点云几何特征不变的条件下,控制点云空间间距,工程中使用的更多一些;_pcl uniformsamplingPCL入门系列 —— UniformSampling均匀降采样_pcl ... - CSDN博客

【PCL 更新】正版登录与崩溃分析优化 - 哔 ... - 哔哩哔哩
2024年5月25日 专栏 / 【pcl 更新】正版登录与崩溃分析优化 【PCL 更新】正版登录与崩溃分析优化 2024年05月25日 10:09 --浏览 --点赞 --评论Login. Forget your passwrod?Log in - PCL Holding Co.,Ltd.2023年11月23日 文章浏览阅读4.1k次,点赞30次,收藏55次。PCL概述_pcl技术_一杯盐水的博客-CSDN博客NOMINMAX6.链接器->输入->附加依赖项设置(将下列库文件复制粘贴进去)(重点)本人配置的是Debug模式,所以所有的debug库目录如下:(注意release版本的库目录需要分开配置,并且版本不一样所得到的库目录不一样,在 ...Windows + VS2022超详细点云库(PCL1.8.1)配置 - CSDN博客

PCL 点云匹配 2 之NICP (Normal ICP) - CSDN博客
2023年12月20日 pcl常见点云匹配方法使用方式,包括ICP、NICP、NDT。总结了下pcl常用的点云匹配方法,后续遇到新的再继续更新。总体上NDT耗时会长很多,效果上三者孰优孰劣不好说,听说在开源领域,NICP是效果最好的ICP匹配方法。2017年6月17日 一、前提 点云的点选、框选事件,现在需要这样的操作:如果要在屏幕上框选点云,需要先点击屏幕、按下键盘x键出发框选,用鼠标框选、按下键盘x键表示结束框选、按下q键表示退出交互(到这一步 基于PCL的屏幕选点、框选点云、单点选取等c++实 2022年3月22日 面向人群1.刚入门点云pcl库技术的本科生、硕士生2.需要一定进阶的一线算法工程人员3.有一定c++编程基础学后收获1.对pcl点云库技术的各个模块有较为深刻的理解2.面向工业级实现,所学内容对标相关岗 win10系统VS2019配置点云库PCL1.12.1的教程与经验总

Windows环境下pcl点云库 安装配置全流程(精简、有
2023年6月14日 面向人群1.刚入门点云pcl库技术的本科生、硕士生2.需要一定进阶的一线算法工程人员3.有一定c++编程基础学后收获1.对pcl点云库技术的各个模块有较为深刻的理解2.面向工业级实现,所学内容对标相关岗 2024年7月21日 或许是之前步骤中的变量计算结果与 pcl::transformVector 函数的期望参数类型不匹配。可以多测试几组不同的点云看一下。 PCL-基于PCA计算点云的最小包围盒、顶点坐标和主轴方向. weixin_52223342: 我也遇到了同样的问题. PCL-基于PCA计算点云的最小包围盒、顶点坐标和 ...PCL-基于PCA计算点云的最小包围盒、顶点坐标和主轴 ...2024年5月24日 文章浏览阅读1k次,点赞3次,收藏3次。其中cloud_in, cloud_out的类型为pcl::PointCloud::Ptr或pcl::PointCloud::Ptr 等点云类型。需要注意的是,调用该函数之前,须检查cloud_in->width是否有值,如果无,须对cloud_in->width进行赋值,否则出错。该函数的作用是通过转换矩阵transform将cloud_in旋转平移得到cloud_out。pcl::transformPointCloud()用法及注意事项 - CSDN博客

在您自己的工程中使用PCL - CSDN博客
2019年7月21日 PCL学习笔记(二):PCL官方教程学习PCD文件制作Features表面法线提取Keypoints提取NARF关键点KdTreeRange ImageHow to create a range image from a point cloudHow to extract borders from range images 本节学习PCL的官方文档教程,记录学习过程 PCD文件制作 在gazebo中建立仿真环境,通过Realsense获取点云,保存为PCD文 2023年5月17日 用户采用指定位置和大小的立方体可以对原始点云进行切割,获取其内部的点云数据用于后续的处理,PCL提供了CropBox滤波器用于该操作。用户需要提前输入确定立方体位置和大小的最大最小坐标值,三维点云共输入6个,这个值实际上可以理解为l立方体对角线的点坐标。PCL点云库(6) — Filters模块空间裁剪器类_pcl::cropbox-CSDN博客与 pcl 的 mew 工艺不同,pla 纤维的准确定位很困难,这可能是由于与 pcl 熔体相比,pla 熔体的粘度更高。与纯 pla 和 pcl 支架相比,打印的复合 pla/pcl 支架具有有序的盒式结构,具有改进的机械性能和细胞-支架相互作用。用于组织工程应用的 PLA、PCL 和复合 PLA/PCL 支架的熔体 ...

【PCL 正式版】正式版累积更新 - 哔哩哔哩
2023年10月25日 先把正式版的更新发出来顺便修了个别 2.6.9 折腾出的新 Bug。关于联机,希望大家先,呃,放低期待这个版本有一个 ...2023年5月29日 PCL概述_pcl技术_一杯盐水的博客-CSDN博客NOMINMAX6.链接器->输入->附加依赖项设置(将下列库文件复制粘贴进去)(重点)本人配置的是Debug模式,所以所有的debug库目录如下:(注意release版本的库目录需要分开配置,并且版本不一样所得到的库目录不一样,在下面会介绍如何得出自己的库目录并将Debug ...VS2022+PCL1.13.0配置保姆级教程 - CSDN博客